
スタックチャン アールティver. 組立キット の組み立ての記録。
スタックチャンはししかわがJavaScriptで開発し、公開している、手乗りサイズのスーパーカワイイコミュニケーションロボットです。
下記のRTのブログも参考に。
スタックチャンの組立キットを開封してみた – スタックチャン アールティver. 組立キットブログ Part.1
***
届いた組み立てキット。RTのブログでは紙箱だったけれどもプラスチックの箱に変わったよう。

中身はこんな感じ。

組み立て方は下記に書いてある。
スタックチャン アールティver. 組み立て
これに沿ってハードを組み立て。
特に難しいところもなく、ここまでできた。

オプションとして説明書にあった、M5Stack CoreS3の固定も行った。
ここで、バッテリーを取り外すのが、上記まで組み立ててからだと難しかったので、一度バラしてバッテリーの端子を基盤からはずした。
そして、組み直してM5Stack CoreS3を裏からネジ固定。その後、バッテリーの端子を絶縁素材の棒とかで押し込んで頑張ってつけた。ここが一番の難所だった。
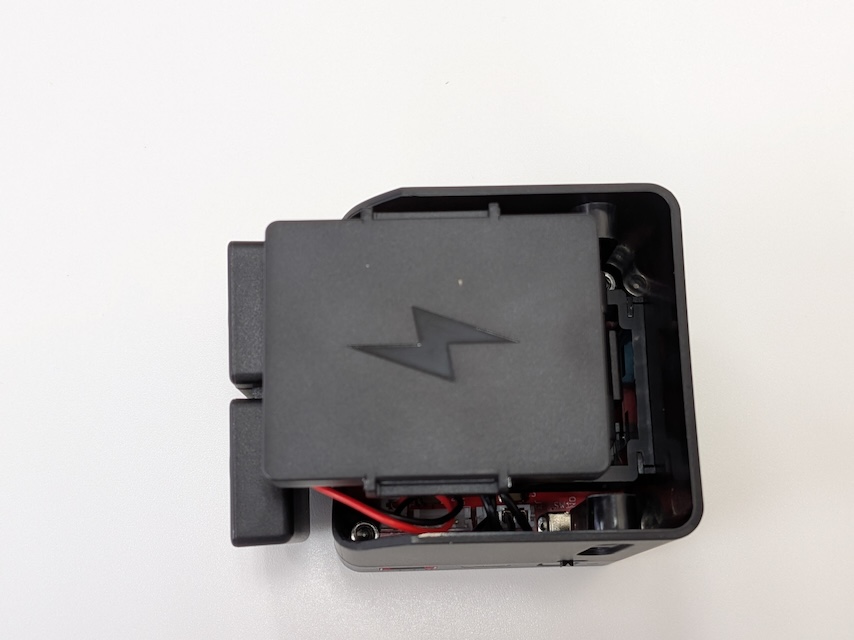
組み上がりがこちら。

とりあえず起動してみたら、テストプログラムが実行された。

テストプログラムで2つのサーボモータが動いて、一度はサーボの位置がおかしいという表示になったけれども、リセットボタンを押してもう一度実行したら正常に終了。

とりあえず、サンプルプログラムを書き込んでみる。
PCの開発環境を整えるのがちょっと面倒なので、webブラウザから書き込むやつだけやってみた。
スタックチャン アールティver.(Stack-chan RT ver.)の「ファームウェアをM5Stackに書き込む」の「Webの場合」のところを実行。
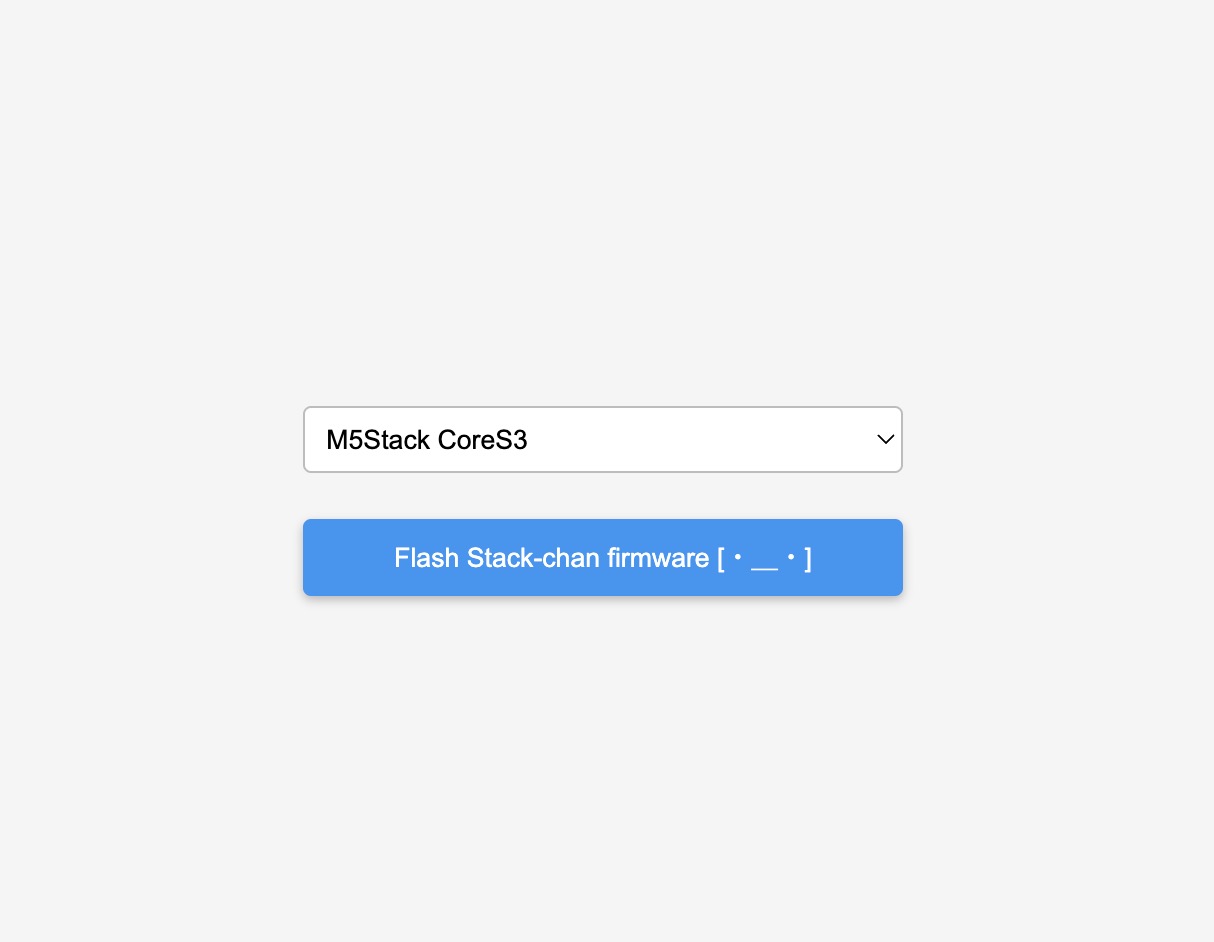
書き込み終わったら、スタックチャンの顔が表示されて、瞬きするようになった。
ということで、今回はここまで。

ちなみに、組み立てセットが入っていたケースは、組み立て後のスタックチャンを横向きに入れられるので、持ち運びにちょうど良さそう。